Los controladores PID son muy utilizados en la industria.
Aunque hay funciones de controlador PID que se incorporan en el PLC, estas funciones se utilizan en muchas aplicaciones.
Aproximadamente el 95% del proceso de lazo cerrado en la automatización industrial utiliza este tipo de controlador por mencionar un valor arbitrario.
PID significa Proporcional-Integral-Derivativo.
Estos tres controladores se combinan de tal forma que puedan controlar el proceso según los valores definidos por el usuario u operario.
Citemos un ejemplo para comprender mejor el funcionamiento del controlador PID.

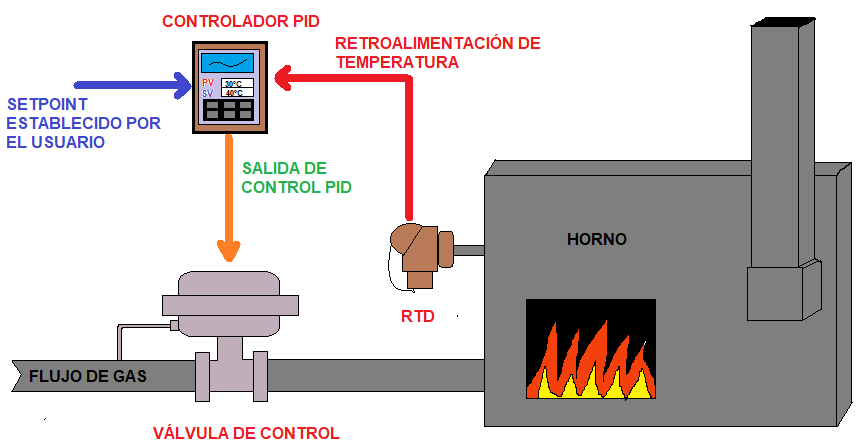
Este es un claro ejemplo del proceso de control de temperatura usando un controlador PID.
Tenemos un horno y se desea controlar la temperatura del horno.
Es por esa razón que tenemos que especificar algún valor de temperatura que deseamos mantener y este valor de temperatura se llama VALOR DESEADO O ESTABLECIDO.
La temperatura del horno se está obteniendo a través de un sensor de temperatura tipo RTD el cual está conectado directamente al controlador PID.
Esto es lo que se denomina en instrumentación como retrolimentación o valor real.
Esta retroalimentación o valor real se compara con el valor establecido y la diferencia entre estas dos señales es nuestro error.
El controlador PID generará la salida basada en esta comparación y dará salida a la válvula de control.
Para mantener la temperatura del horno, se controla el flujo de gas mediante una válvula de control.
La posición de la válvula de control se decide aquí a través de la salida del controlador PID.
El tiempo de respuesta del proceso simplemente dependerá de los tres valores que son: ganancia proporcional, tiempo integral y tiempo derivativo.
CONTROLADOR PROPORCIONAL (CONTROLADOR P).
El control proporcional genera la salida de control proporcional directamente al error.
Este valor de error es multiplicado por la ganancia proporcional con el fin de determinar la respuesta de la salida del sistema.
Si la ganancia establecida es demasiado alta, la salida del controlador entrará en oscilación y éste tendrá un comportamiento inestable.
si la ganancia establecida es muy baja, la salida del controlador no responderá a los cambios del valor establecido.
Uno de los inconvenientes más significativos del controlador proporcional es sin duda el desplazamiento el cual es un error sostenido y no se eliminará utilizando solo un controlador proporcional.
En este tipo de sistemas de control, la velocidad de respuesta aumenta cuando aumenta la ganancia proporcional.
MODO DE CONTROL INTEGRAL (CONTROLADOR PI).
Debido a la limitante que posee un controlador proporcional, existe un desplazamiento continuo.
El controlador integral aumentará y disminuirá continuamente la salida del controlador con el fin de disminuir el error (más no lo eliminará).
Si el valor del error es significativamente grande, el controlador PI aumentará/disminuirá la salida del controlador rápidamente.
Si el valor del error es pequeño, el modo integral ralentizará la función.
Si se tiene un tiempo integral significativamente grande, la velocidad de respuesta del controlador será más lenta.
Para un tiempo integral pequeño, la velocidad de respuesta será rápida.
MODO DE CONTROL DERIVATIVO (CONTROLADOR PID).
Existe una limitación del controlador Integral de que no puede predecir el comportamiento futuro del error.
Por esta razón,reacciona solo una vez cuando hay un cambio en el valor establecido.
El controlador derivativo, genera la salida en función de una tasa de cambio de error y funcionará más rápido que el controlador PI.
Si no hay cambio en el error, la salida de este controlador es cero.
La velocidad de la respuesta aumenta con el incremento del tiempo derivativo.
Si el valor del tiempo derivativo es demasiado grande, se producirá una oscilación y el sistema se volverá inestable.
Para el valor cero del tiempo derivado, la salida del controlador será cero.
GRÁFICA CONTROLADOR P-PI -PID
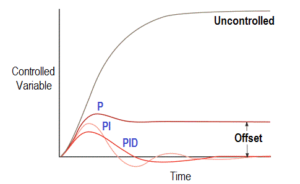
Las gráficas representan el comportamiento de un sistema incontrolable en función del tiempo y luego la respuesta de un controlador P-PI y PID cuando se le incorporan acciones de control.
CONTENIDOS RELEVANTES.