NOTAS DE CLASE DEL CURSO DE IDENTIFICACIÓN DE SISTEMAS. CRÉDITOS: (DOCENTE GUIOVANNY SUAREZ RIVERA) POLITECNICO COLOMBIANO JAIME ISAZA CADAVID.
en este post hablaremos del modelado en tiempo contínuo de una planta de presión para toma de datos.
Supongamos que se obtuvo el modelo del sistema en tiempo continuo del siguiente formato matemático
 |
| ecuacion 1 |
El modelo anterior corresponde a un sistema de PRIMER ORDEN CON RETARDO.
No obstante, también es aplicable para sistemas de orden superior (recomendable hasta sistemas de tercer orden.
EJEMPLO: partiendo del siguiente modelo:
 |
| ecuacion 2 |
que representa el comportamiento de un sistema de presión (el comportamiento es dinámico): diseñe y simule el circuito electrónico usando amplificadores operacionales.
SOLUCIÓN
De acuerdo a la planta tenemos los siguientes parámetros que son:
K=0.9714 (ganancia)
T=1.5386 (constante de tiempo)
Retardo theta =0.1361
PASO 1
Si el modelo tiene retardo, se debe realizar una aproximación del modelo a un sistema de orden superior. El método a utilizar es el método de pade, el cual hace que el termino
se elimine con una equivalencia de orden 1 denotada como:
 |
| ecuacion 3 |
n representa el orden del sistema.
Haciendo n=1 en la ecuación anterior nos queda de la siguiente forma:
 |
| ecuacion 4 |
Reemplazando en la forma general de un sistema POR se llega a lo siguiente:
 |
| ecuacion 5 |
Reemplazando los valores mencionados anteriormente, se obtiene el siguiente modelo (retardo, ganancia, constante de tiempo)
 |
| ecuacion 6 |
Siguiente paso: llevar la función de transferencia obtenida a la forma general Gp(s)
 |
| ecuacion 7 |
es importante recordar que el grado del numerador debe ser menor que el grado del denominador.
Luego se lleva la función de transferencia a la forma canónica controlable (F.C.C)

Del modelo Gp(s) se tiene que:


Luego de haber efectuado el análisis, se debe efectuar la siguiente tabla de diseño para seleccionar los valores de resistencia.



FORMATO CIRCUITAL PARA EL DISEÑO DE LA PLANTA.
 |
| figura 1 |
ECUACION CIRCUITAL.
 |
| Ecuacion 8
PARA LA ECUACIÓN 1
 |
el primer circuito quedaría modelado de la siguiente forma:
 |
| figura 2 |
para la ecuación N°2
Para la ecuación N°2
B1=-9.550 a1=1 A=1
B2=-15.345 B=24.89
AT=A-B-1= 1-1-24.89-1= -24.89 < 0
Rf=k.zi= (25.89)*(20k)=517.9k


el segundo circuito quedaría modelado de la siguiente forma:

para la ecuación 3 de salida.

el circuito quedaría de la siguiente forma

ahora requerimos integradores de miller complementar nuestra planta de presión electrónica.
CIRCUITO INTEGRADOR DE MILLER
Es una aplicación de convertidores de impedancia negativa NIC, de otras tantas como lo son las fuentes de corriente regulada donde el capacitor es reemplazado por un resistor. Este integrador tiene algunas ventajas sobre el integrador básico ( capacitor como lazo de realimentación), puesto que el capacitor se conecta físicamente a tierra y no a través de la tierra virtual del amplificador operacional y por lo tanto no requiere de una resistencia para su descarga y el polo del integrador estará sobre el origen del plano complejo o sea que se comporta como un integrador puro.




Valores recomendados
R=200k
C=10uF

ECUACIONES DE ESTADO
=-9.550×1-15.345×2+u
Y=9.277×1-0.631×2
ECUACIONES DE CIRCUITO ELECTRICO
Xo=x2
Xo=x1-9,55
Xo= 9.277×1-0.631

Debemos determinar el valor máximo de salida de la planta cuando su entrada es también un valor máximo. Para determinarlo se usa el teorema de valor máximo.

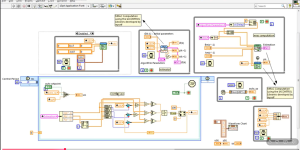
UNIFICANDO TODOS LOS CIRCUITOS, LA PLANTA DE PRESIÓN QUEDARÍA ASI.
 |
|
SIMULACIÓN ANTE UNA ENTRADA ESCALÓN DE MAGNITUD 5 CON PROTEUS
 |