En los últimos años, la tecnología de los sistemas de control automático se ha caracterizado por sustituir bucles de control análogo por sistemas de control digital.
La utilización de sistemas de cómputo llámese: sistema embebido, microcontrolador, procesador, DAQ en los procesos industriales permite resolver problemas específicos de control con una mejor relación de funciones de monitoreo, supervisión, procesamiento y tratamiento de datos a un bajo coste computacional.
Con el control discreto o digital usted puede modificar la estrategia de control con solo cambiar instrucciones en su programa, el dispositivo embebido puede controlar procesos de forma simultánea y dependerá de sus características.
SISTEMAS DE CONTROL EN TIEMPO DISCRETO.
Son sistemas dinámicos en los cuales participan una o más variables las cuales varían en ciertos instantes de muestreo.
Se indican como KT que es considerada como la lectura de un espacio de memoria.
Los sistemas de control digital trabajan con señales discretas o digitales.
Una señal digital se obtiene a partir del muestreo de una señal continua y se analizan en el dominio del tiempo mediante la transformada z.
Una señal discreta es aquella que se conoce solo en ciertos instantes de tiempo definidos como KT, donde K=0,1,2……n
T es el periodo de muestreo.
DIAGRAMA DE BLOQUES DE UN SISTEMA DE CONTROL DIGITAL.

MUESTREADOR

El muestreador hace parte del conversor análogo digital A/D y se puede entender como un interruptor que se cierra cada t segundos.
La magnitud de la señal muestreada corresponde en la magnitud de la señal continua evaluada en k.
En la práctica la duración del muestreo debe ser mucho menor que la constante de tiempo más significativa de la planta.
El muestreador tiene como objetivo convertir una señal continua en el tiempo en un tren de pulsos en los instantes de muestreo T, 2T, 3T…..nT.
Teniendo en cuenta que la salida de un muestreador es un tren de pulsos ponderado, es posible relacionar la señal contínua x(t) con la salida del muestreador mediante la siguiente ecuación.

donde:
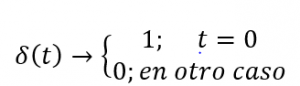
![]() representa el tren de pulsos unitarios.
representa el tren de pulsos unitarios.
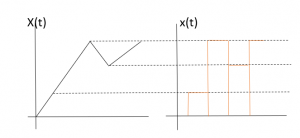
REPRESENTACIÓN GRÁFICA DE UNA SEÑAL CONTINUA MUESTREADA.

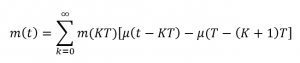
La expresión matemática para el muestreador es:

Resolviendo para los primeros n términos:

Recordar que:

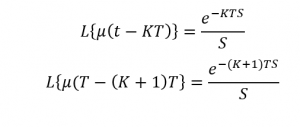
APLICANDO TRANSFORMADA DE LAPLACE A AMBOS CASOS:

Reemplazando en la ecuación de los n términos:
nos queda lo siguiente:

finalmente; la ecuación en términos de laplace (S) queda de la siguiente forma:

SISTEMAS DE CONTROL EN TIEMPO DISCRETO.
RETENEDOR.

El retenedor hace parte del conversor digital/analógico (D/A).
Este elemento se encarga de convertir una señal discreta muestreada en una señal de tipo continua.
Este elemento se encarga de reconstruir la señal análoga después de ser muestreada de tal forma que sea igual o lo más aproximadamente posible a la señal aplicada al muestreador.
El retenedor más utilizado para los procesos de reconstrucción es el: RETENEDOR DE ORDEN CERO y para lo que se va a trabajar en esta página, se conocerá como ZOH.
Existen retenedores de primer y segundo orden los cuales reconstruyen la señal en forma más exacta que los de orden cero pero introducen un retardo adicional al sistema el cual NO ES RECOMENDABLE en aplicaciones de control.
REPRESENTACIÓN GRÁFICA DE UNA SEÑAL DISCRETA RECONSTRUIDA
teniendo en cuenta la siguiente ecuación:
la expresión matemática para el retenedor (ZOH) es:
expresándolo en términos de laplace, nos quedaría de la siguiente forma:
Reemplazando en la ecuación del retenedor en términos de laplace (S) nos queda de la siguiente forma:
operamos los exponentes y sacamos factor común
por lo tanto, expresando la ecuación en términos de laplace:
vamos a resolver un ejercicio para aterrizar los conceptos:
Para el sistema de la figura:

si f(t)=0.5t+2; hallar expresiones matemáticas para:
f*(t)
f1(t).
Para este ejercicio, el periodo de muestreo es de T=0.6segundos (s)
SOLUCIÓN.

Expresión de muestreo:
Reemplazando en la expresión de muestreo lo señalado en color rojo, nos queda:

usted puede evaluar los términos que quieran. Para este caso evaluaremos los primeros n=6 términos por facilidad.

evaluando desde k=0 hasta k=6, la expresión nos queda de la siguiente forma:

Lo anterior se obtuvo reemplazando el valor de K en la sumatoria.
La ecuación expresada anteriormente, representa el muestreo de la señal de la función f(t).
Ahora se le va a aplicar reconstrucción o retención a la señal.
para los primeros n=6 términos, se tiene:


organizando la expresión, nos queda de la siguiente forma:

el tiempo transcurrido cuando k=4 es:4(0.6)=2.4 segundos.
REPRESENTACIÓN GRÁFICA DEL EJERCICIO ANTERIOR.
(SEÑAL MUESTREADA Y RETENIDA)

visita nuestros contenidos relacionados con máquinas eléctricas.
visita nuestros contenidos relacionados con PLC
visita nuestros contenidos relacionados con mediciones e instrumentación.
CONTENIDOS MÁS RELEVANTES.