Saludos apreciados lectores.
En este post mostraremos de forma fácil, como hallar la función de transferencia para un sistema masa-resorte-amortiguador.
Este tipo de sistemas son muy comunes en los cursos de Física Mecánica porque involucran ecuaciones como la ley de Hooke, la segunda ley de newton, y la ecuación de viscocidad de un amortiguador.
El propósito de este blog por el momento, no es estudiar en detalle la física mecánica aunque no estamos cerrando la posibilidad de escribir posts en un futuro, de cálculo y otras asignaturas relacionadas con la ingeniería.
Recomendamos al lector de este post, que todo lo aprendido en Sensoricx se lleve a una experiencia o a la práctica para que el aprendizaje de estos temas se hagan más interesantes y divertidos.
Siempre buscando acercarse un poco a las simulaciones o a la realidad.
ANALIZANDO EL SISTEMA MASA-RESORTE-AMORTIGUADOR.
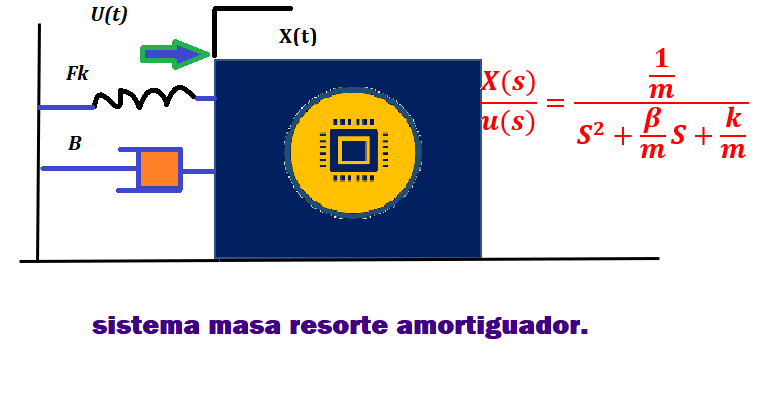
Primeramente se debe analizar el sistema el cual está compuesto por una masa, un resorte y un amortiguador como el mostrado en la figura 1.
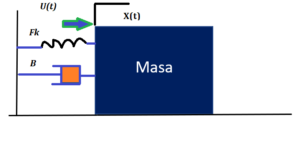
Cada elemento mostrado en la figura tiene una ecuación que describe su comportamiento.
Las ecuaciones son las siguientes:
Ley de Hooke para los resortes:
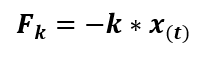
Donde:
K es la constante elástica N/m.
X(t) es el desplazamiento del resorte en m.
Ecuación de un amortiguador:
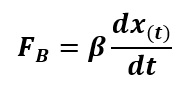
Donde:
FB es la fuerza de viscocidad del amortiguador.
B: Es el coeficiente de viscocidad.
dx/dt: Derivada del desplazamiento respecto al tiempo.
Ley de Newton:
Donde:
F: Fuerza en Newtons.
m: masa
a: aceleración.
Ecuación de la aceleración.
donde:
a: es la aceleración
y la derivada al cuadrado del desplazamiento respecto al tiempo al cuadrado.
![]()
U(t): Fuerza externa que se aplica directamente a la masa.

X(t) es la salida del sistema.
En este caso se considera como desplazamiento de salida.
Se plantea el análisis con la segunda ley de Newton en relación a la sumatoria de fuerzas.
Para el caso del ejercicio, se considerará a la fuerza externa U y al desplazamiento X como variables positivas del sistema.
A la fuerza externa aplicada en el sistema, se le oponen las fuerzas del resorte, el amortiguador así como la masa.
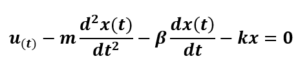
Teniendo en cuenta lo dicho, la ecuación planteada se representa de la siguiente forma:
Añadiendo la ecuación de la aceleración, quedaría de la siguiente forma:
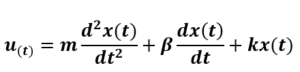
Lo que está restando en esta ecuación, pasa a el otro lado a sumar, haciendo esto, la ecuación quedaría de la siguiente forma:
A continuación, se debe convertir esta ecuación diferencial de segundo orden en términos de laplace:
Lo que tiene derivada, se le asigna una S y las variables que están en función del tiempo como x(t) y u(t), pasan a denotarse como x(s).

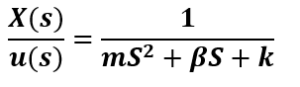
A continuación, se saca factor común X(s) en la ecuación anterior.

En relación con lo anterior, se establece la relación de salida que en este caso es X(s) y la de entrada que es U(s) y nos quedará de la siguiente forma:
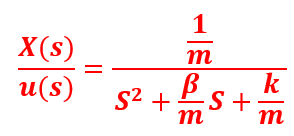
Y por último se normaliza la función de transferencia en su denominador de tal forma que quede expresado en forma de trinomio cuadrado perfecto.
CONCLUSIONES FINALES.
Para poder enfrentarte al análisis matemático de sistemas de control, debes conocer las ecuaciones que lo rigen y recordar un poco de algunos temas relacionados con la física y la química.
No basta con analizar este sistema por analizarlo, es necesario tener algunos conocimientos matemáticos para llegar finalmente a un resultado que puede ser representado mediante una ecuación general.
En lo posible, todos estos conceptos deben ser aterrizados mediante simulaciones, por lo cual te invitamos a que uses MATLAB o LABVIEW para simular este tipo de sistemas.
CONTENIDOS RELEVANTES.