Los sistemas POR y SOR nos introducen a la identificación de sistemas ya que a través de la modelamiento de estos podemos escoger, indicar e identificar cual es el mejor controlador para un proceso industrial en específico sometiendo el mismo ante un escalón unitario.
Por tanto en la reciente práctica de laboratorio se tomaron una serie de parámetros matemáticos basados en una serie de ecuaciones para describir cuál de los sistemas funciona en óptimas condiciones partiendo de gráficos propuestos.
IDENTIFICACIÓN DE SISTEMAS: APROXIMACIÓN DE PADÉ
OBJETIVO. Desarrollar la identificación no paramétrica de sistemas, encontrando aproximaciones a modelos de primer y segundo orden con retardo.
Modelo planta de primer orden con retardo (Modelo POR). La función de transferencia correspondiente a este tipo de planta está dada por:
En donde K es la ganancia de la planta, θ el retardo y T la constante de tiempo. El procedimiento experimental para obtener el modelo, consiste en abrir el lazo de control antes del elemento final de control y crear un cambio en el escalón del proceso. La respuesta del sistema se gráfica y sobre la curva obtenida se hace el análisis para estimar los valores de la ganancia, de la constante de tiempo y del retardo. En la curva obtenida como respuesta, se eligen dos puntos representativos, para los cuales la respuesta alcanza el 28.3% y el 63.2% de su valor final.

Con los datos obtenidos de la gráfica se plantean las siguientes ecuaciones:

Los valores de t1 y t2 se calculan directamente de la gráfica o de la base de datos obtenida. Resolviendo simultáneamente el sistema de ecuaciones. El valor de la ganancia se obtiene mediante el cociente entre el cambio de la variable de salida y el cambio en la variable de entrada.
Modelo planta de segundo orden con retardo (Modelo SOR). La función de transferencia correspondiente a este tipo de planta está dada por:

En donde:

Siendo K la ganancia de la planta, wn la frecuencia natural, ξ el coeficiente de amortiguamiento, θ el retardo y T1, 2 las constantes de tiempo. El procedimiento experimental para estimar el modelo consiste en obtener la curva de reacción o la base de datos del proceso, a partir de la aplicación de escalones dentro de la zona de trabajo como se indicó anteriormente para el modelo POR. En este caso se seleccionan los puntos corresponden a aquellos para los cuales la respuesta del sistema ha alcanzado el 15%, el 45% y el 75% del valor total del cambio experimentado por el sistema ante la aplicación del escalón.

Con los datos obtenidos de la gráfica se plantean las siguientes ecuaciones:

IDENTIFICACIÓN DE SISTEMAS: APROXIMACIÓN DE PADÉ
Los valores obtenidos con las ecuaciones se reemplazan para obtener los parámetros del sistema. Procedimiento. 1. Las gráficas corresponden a la respuesta en lazo abierto, de diferentes procesos ante una entrada en escalón. Obtenga sus modelos matemáticos correspondientes aproximándolos a un sistema de primer orden y segundo orden con retardo.
PRIMERA GRÁFICA




Ya con los datos de los tiempos se procede a resolver las ecuaciones para un Sistema de Segundo orden, de la siguiente forma:







Obtenga la gráfica de respuesta en MATLAB de las funciones de transferencia obtenidas en los numerales anteriores. Utilice como estímulo de entrada la señal escalón. La respuesta ante una entrada escalón para SOR y POR de la primera gráfica:

La respuesta ante una entrada escalón para SOR y POR de la segunda gráfica:

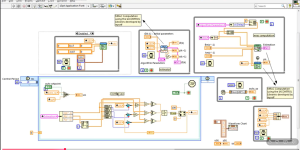
Obtenga la gráfica de respuesta en SIMULINK de las funciones de transferencia obtenidas en los numerales anteriores. Utilice como estímulo de entrada la señal escalón. La gráfica ante una entrada escalón en simulink para la primer gráfica es:



IDENTIFICACIÓN DE SISTEMAS: APROXIMACIÓN DE PADÉ
CONCLUSIONES
Se profundiza lo aprendido en clase hacer de cómo saber la función de transferencia a través de una curva reacción tanto para un sistema de primer orden y de segundo orden.
El retardo del sistema POR es mayor que la del sistema SOR esto cumple para las dos gráficas.
Por lo anterior el sistema SOR solo para estos dos casos responde más rápido.
Tanto en simulink como el código dieron las mismas gráficas.
El método que se realiza es muy experimental ya que para sacar los tiempos y las magnitudes en los diferentes porcentajes puede que no sea el más preciso entonces la función de transferencia puede generar errores.
BIBLIOGRAFIA
OGATA, KATSUHIKO. Ingeniería de Control Moderna. 3a edición. Prentice-Hall. Hispanoamericana, S.A.. 1998.