Para mostrar la respuesta temporal de varios sistemas de control utilizando MATLAB, se tienen en cuenta varias consideraciones.
1. Se crea un menú con la función propia de MATLAB que se llama menu(‘opcion1′,’Opcion2’
2. Por cada opción del menu, se presenta la función de transferencia del sistema y su respectiva gráfica con sus características
3. Finalmente se realiza la simulación
Análisis
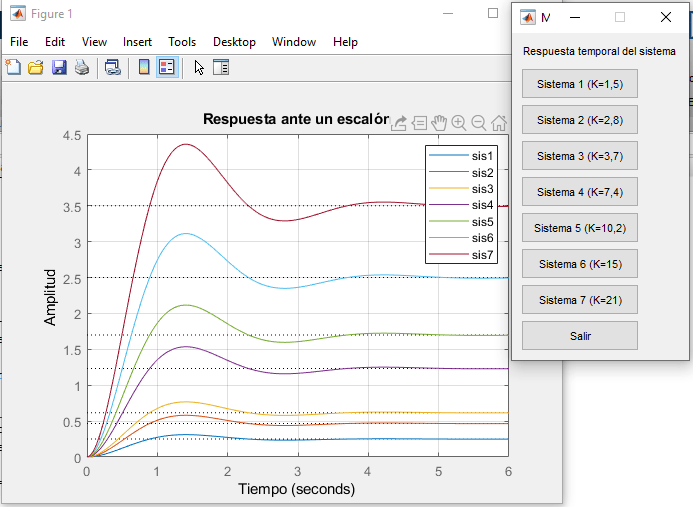
Los sistemas son de segundo orden y sin retardo. Se puede percibir en las gráficas, que el valor de K varía; lo que genera que se presenten máximos sobre impulsos y el tiempo pico aumente.
Además, los sistemas no se estabilizan en el escalón unitario, por ende no son estables y no hay tiempo de establecimiento.
CODIGO FUENTE.
%Respuesta ante una entrada escalón
%Nat Arenas L
% Y(S)/R(S)= K/S^2+2S+6
K=menu('Respuesta temporal del sistema', 'Sistema 1 (K=1,5)', 'Sistema 2 (K=2,8)','Sistema 3 (K=3,7)','Sistema 4 (K=7,4)','Sistema 5 (K=10,2)','Sistema 6 (K=15)','Sistema 6 (K=21)','Salir')
while(K)
if K==1
n=[1.5]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis1=tf(n,d) %Permite crear la función de trasnferencia
step(sis1) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==2
n=[2.8]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis2=tf(n,d) %Permite crear la función de trasnferencia
step(sis2) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==3
n=[3.7]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis3=tf(n,d) %Permite crear la función de trasnferencia
step(sis3) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==4
n=[7.4]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis4=tf(n,d) %Permite crear la función de trasnferencia
step(sis4) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==5
n=[10.2]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis5=tf(n,d) %Permite crear la función de trasnferencia
step(sis5) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==6
n=[15]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis6=tf(n,d) %Permite crear la función de trasnferencia
step(sis6) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==7
n=[21]; %Valor del numerador de la FT
d=[1 2 6]; %Valor del denominador de la FT
sis7=tf(n,d) %Permite crear la función de trasnferencia
step(sis7) %Genera el estimulo del sistema
legend() %Genera una etiqueta de texto para indentificar la gráfica
title('Respuesta ante un escalón') %Función para el título de la gráfica
xlabel('Tiempo') %Función para el título del eje x
ylabel('Amplitud') %Función para el título del eje y
grid on %Poner la cuadrícula
hold on %Conserva la gráfica actual
end
if K==8
break; %Para salir del menu
end
K=menu('Respuesta temporal del sistema', 'Sistema 1 (K=1,5)', 'Sistema 2 (K=2,8)','Sistema 3 (K=3,7)','Sistema 4 (K=7,4)','Sistema 5 (K=10,2)','Sistema 6 (K=15)','Sistema 7 (K=21)','Salir')
end
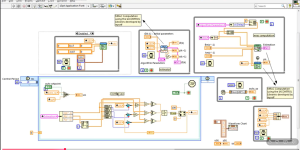
GRÁFICA EN MATLAB DE LOS SISTEMAS MOSTRADOS EN PANTALLA.
CONTENIDOS MÁS RELEVANTES.