El circuito integrado L293D es un puente H de tipo cuádruple de alta corriente el cual está diseñado para hacer girar dos motores de corriente directa en ambos sentidos o de forma bidireccional, es decir: en modo avance y retroceso.
Los motores que puede hacer mover este circuito integrado, van desde los 600 mA con voltajes de alimentación desde los 4.5 a 36V, puede impulsar o mover cargas de tipo inductivas aparte de los motores como los solenoides y relés.
dentro de las características eléctricas de este circuito integrado tenemos las siguientes:
- Capacidad de corriente de salida: 600 mA por cada conductor.
- Corriente pulsatoria máxima de 1.2A por controlador.
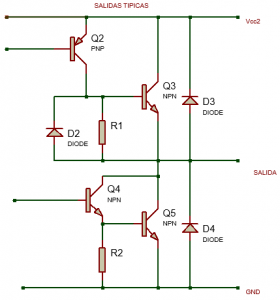
- Diodos de abrazadera de salida para eliminar efectos inductivos.
- Amplio rango de voltaje de suministro el cual va desde los 4,5 a 36 voltios.
- Entradas lógicas de forma independiente.
- Apagado térmico.
- Protección por descargas electrostáticas (ESD).
- Entradas de alta inmunidad al ruido.
- Reemplazo de tipo funcional por el SGS L293.
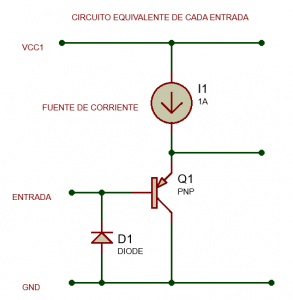
Todas las entradas de este circuito integrado son compatibles con voltajes de lógica transistor, transistor (TTL), cada salida para este transistor en particular es un circuito completo de conducción con un conjunto de transistores Darlington y una fuente pseudo Darlington.
El control para los motores se realiza por los pines definidos como HABILITADORES o ENABLES.
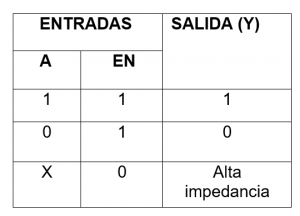
Si una de las entradas de habilitación es alta, los controladores asociados quedarán habilitados y sus salidas estarán activas y en fase con sus respectivas entradas.
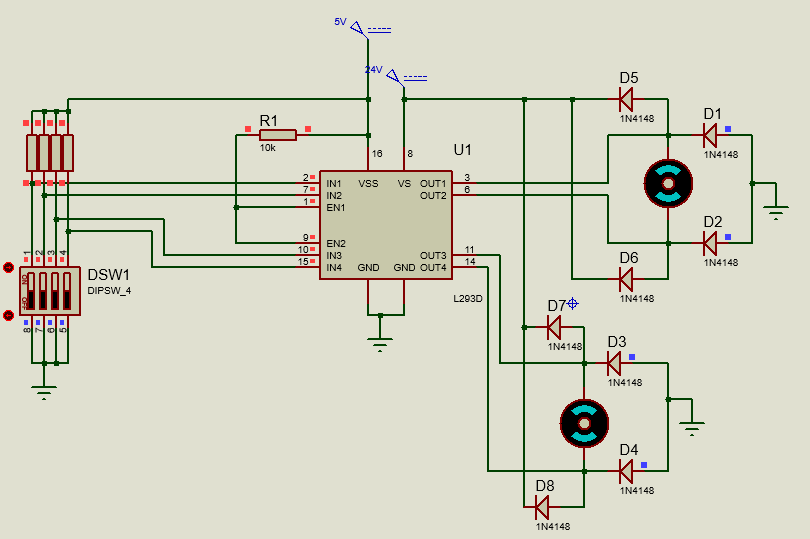
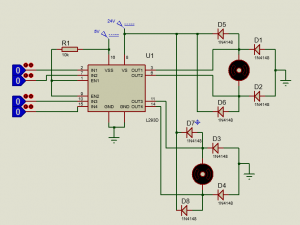
NOTA: se recomienda el uso de DIODOS preferiblemente de alta velocidad (1N4148) para eliminar la supresión de transitorios inductivos.
Cuando la señal en la entrada de habilitación es baja, los controladores asociados quedarán deshabilitados y sus salidas estarán apagadas y en alta impedancia.
Con las señales enviadas adecuadamente por la entrada de datos, los controladores forman una unidad reversible o puente para aplicaciones para motores o solenoides.
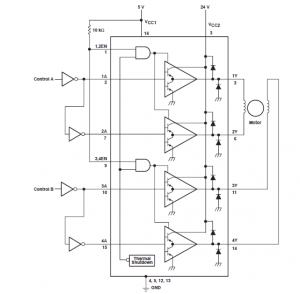
De acuerdo a lo apreciado en el datasheet de este componente mostrado en la figura 1, se puede apreciar que se proporciona un terminal Vcc1 separado de Vcc2 esto con el fin de que las entradas lógicas minimicen la potencia del dispositivo.
Un dato a tener en cuenta es la temperatura a la que puede trabajar este dispositivo la cual va desde los 0ºC hasta los 70 º. Si se excede o hay un sobrepaso de los rangos de temperatura del dispositivo, no se garantiza su correcto funcionamiento y puede afectar la implementación del dispositivo electrónico.
ESTRUCTURA FÍSICA DEL CIRCUITO INTEGRADO L293D.
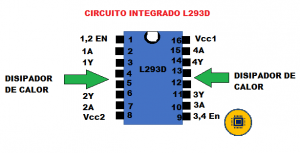
NOTA: Los pines 4,5,12,13 son pines de disipación de calor y tierra (Ground).
SIMBOLO LÓGICO +
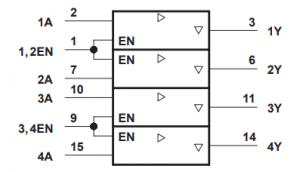
DIAGRAMA LÓGICO.
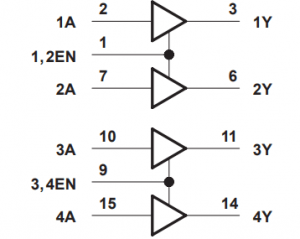
TABLA DE FUNCIONES.
CIRCUITOS DE ENTRADA Y SALIDA INTERNOS PARA EL CIRCUITO INTEGRADO L293D.
CONDICIONES RECOMENDADAS DE OPERACIÓN PARA EL CIRCUITO INTEGRADO L293D.

CIRCUITO DE APLICACIÓN PARA CONEXIÓN DE MOTORES CON EL CIRCUITO INTEGRADO L293D.
De acuerdo al datasheet mostrado en la figura 6, usted puede conectar un motor bifásico de 4 hilos con el circuito integrado L293D y conectar simultáneamente las entradas de habilitación para controlar el giro del motor.
A través de los pines 3,6 y 11,14 puede controlar dos motores de forma independiente tal y como se logra apreciar en la figura 7, los pines 2,7 y 10,15 permiten controlar el giro independiente de cada uno de los motores.
Una mejor representación para los que no entienden un poco los estados lógicos, es hacerlo por medio de un dipswitch tal y como se muestra en la figura 8.
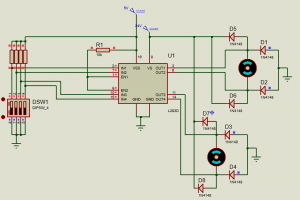
NOTA: los 4 pares de resistencias son de 1k ohm cada uno.
VIDEO DE FUNCIONAMIENTO DEL CIRCUITO INTEGRADO L293D.
ENLACES RELACIONADOS.
COMPRAR CIRCUITO INTEGRADO L293D
MANEJO DE POTENCIA PARA MOTORES CON EL CIRCUITO INTEGRADO L293D
MERCADOLIBRE CIRCUITO INTEGRADO L293D
CIRCUITO INTEGRADO L293D CON ARDUINO
visita nuestros contenidos relacionados con máquinas eléctricas.
visita nuestros contenidos relacionados con PLC
visita nuestros contenidos relacionados con mediciones e instrumentación.
PRODUCTO INTERESANTE
CONTENIDOS MÁS RELEVANTES.