CONTROL AUTOMÁTICO: CONCEPTOS BÁSICOS.
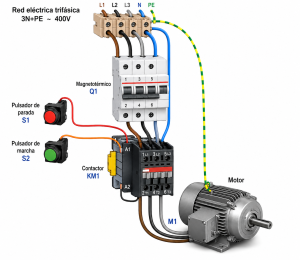
ELEMENTO FINAL DE CONTROL: Es un dispositivo que recibe la señal de control, la procesa y varía la variable medida. A nivel industrial el elemento final de control más usado es la válvula de control que puede ser(neumática, motorizada, o de campo eléctrico).
otros elementos finales de control son: MOTORES, RESISTENCIAS CALEFACTORAS, BOMBA(MOTOBOMBA) SERVO-MOTORES, RESISTENCIAS, RELÉ DE ESTADO SÓLIDO, SSR, SCR, TRIACS, TRANSISTORES DE POTENCIA Y ALGUNOS DRIVERS.
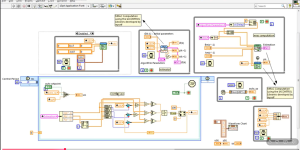
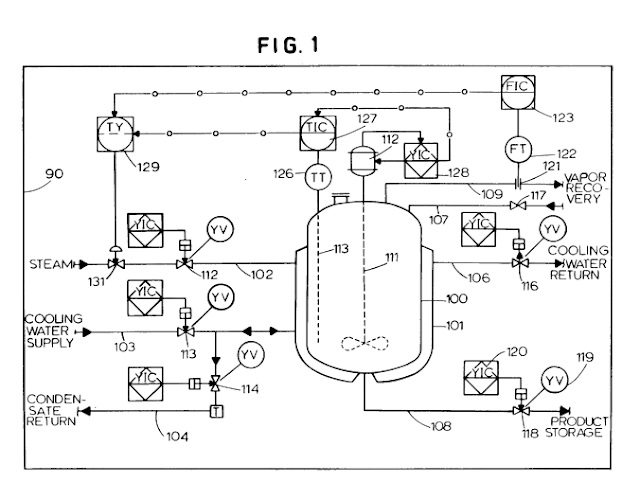
por ejemplo: se nos pide caracterizar cada uno de los componentes, variables finales y unidades del diagrama mostrado en la siguiente figura:

variable medida: temperatura y flujo
variable controlada: temperatura y flujo
variable manipulada: flujo de vapor
perturbación interna: variaciones del cambio de flujo
perturbación externa: cambio en la referencia o set-point.
el diagrama describe un proceso de agitación continua en un tanque cerrado.
CONTROL AUTOMÁTICO: CONCEPTOS BÁSICOS.
estos pueden ser en LAZO ABIERTO. O LAZO CERRADO
LAZO ABIERTO: Se refiere a aquellos sistemas en los cuales la salida no actúa sobre la entrada, además de no estar controlando las variables de forma automática sino manual: dentro de los ejemplos tenemos: hornos, microondas, neveras, aires acondicionados, semáforos.

LAZO CERRADO: Aquellos sistemas en los cuales la salida retorna nuevamente a la entrada para efectos de comparación en dichos sistemas de lazo de realimentación.
en un sistema de lazo cerrado, se alimenta el controlador con la señal de error, la cual resulta de comparar la salida con la entrada de referencia o set-point.

CLASIFICACIÓN DE SISTEMAS DE CONTROL.

SISO: una entrada una salida
SIMO: una entrada- múltiples salidas
MISO: múltiples entradas-una salida
MIMO: múltiples entradas-múltiples salidas.
CLASIFICACIÓN DE LOS SISTEMAS DE CONTROL DE ACUERDO AL TIEMPO
TIEMPO CONTINUO: son sistemas que se modelan por ecuaciones diferenciales. se implementa la transformada de laplace. se tiene conocimiento del valor de las variables en cualquier instante (t), se suelen implementar con amplificadores operacionales, se analiza el plano «s»
TIEMPO DISCRETO: Son sistemas que se modela por ecuaciones en diferencia y se implementa la transformada z, se tiene conocimiento de las variables solo en ciertos instantes KT se implementan con sistemas embebidos.

De acuerdo a lo que podemos decir de ambas gráficas, la figura 1 correspondiente al plano S muestra la región de estabilidad de un sistema de control en tiempo continuo. Los polos que se encuentren ubicados en la región color gris de la gráfica determinan cuan estable será la planta modelada matemáticamente. Estos polos pueden ser reales o imaginarios así como también el sistema puede ser: SOBREAMORTIGUADO, SUBAMORTIGUADO, OSCILATORIO O CRITICAMENTE AMORTIGUADO.
La segunda figura corresponde al plano z y determina que la región de estabilidad es toda una circunferencia alrededor del plano z. Esta se conoce como el círculo unitario. Para que un sistema sea estable, los polos deben estar ubicados alrededor de dicho círculo y no alejados. Si por algún motivo llegase a encontrarse un polo en uno de los arcos de la circunferencia, el sistema sería oscilatorio. si un polo da por fuera del círculo, el sistema sería inestable.
VÍDEO EXPLICATIVO.