

PROCEDIMIENTOS PARA LA IDENTIFICACIÓN DE SISTEMAS
 |
| http://www.elfinanciero.com.mx/bajio/sabes-que-es-un-sistema-embebido |
DETERMINACIÓN DE LA CURVA DE LINEALIDAD.
Este procedimiento permite determinar el punto de operación del proceso. Los datos para su construcción se obtienen del sistema de control en lazo abierto (manual), es decir: cambiando el control automático o manual, cubriendo toda la zona lineal del proceso realizando escalones del mismo valor entre el 0% y 100% o en forma descendente del 100% al 0%. Luego de obtenida la curva de linealidad, se deben encontrar los mejores puntos de operación sobre la parte más lineal de la curva. En resumen, podemos ver el proceso en el siguiente gráfico que contiene un lazo de control abierto.
 |
Figura N°1 apertura del lazo.
Ejemplo: para la representación que se muestra en la figura correspondiente a un sistema de control de temperatura en un intercambiador de calor, construya la curva de linealidad y encuentre sus zonas de operación.
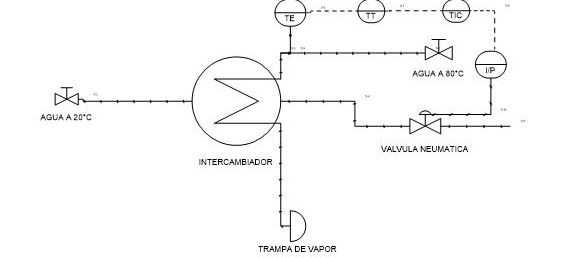 |
| Figura N°2 intercambiador de calor. |
SOLUCIÓN.
Asumamos que se efectuó la toma de datos en lazo cerrado y los datos obtenidos luego de su tratamiento fueron los siguientes:
Los valores de salida en la tabla corresponden al valor medio de los últimos 19 datos. Con dicha tabla se procede a construir la curva de linealidad de la siguiente forma:
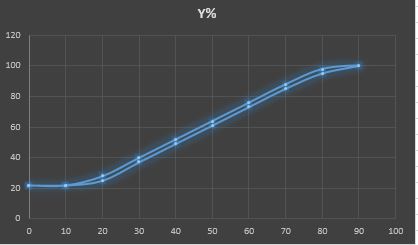 |
Figura N°3 gráfico correspondiente a la tabla Para determinar el punto de operación del sistema, se calcula la pendiente de cada recta. 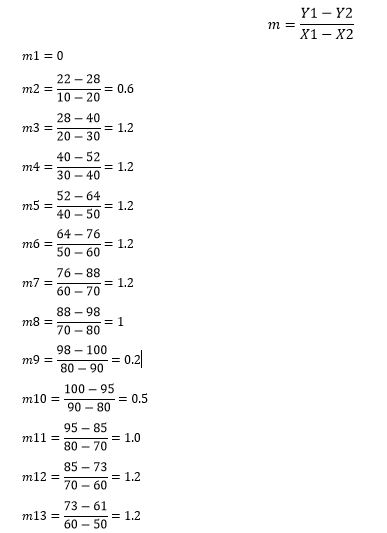  De acuerdo a lo anterior, podemos determinar que el punto de operación del sistema es de:1.2 Para el proceso, el punto de operación para la zona ascendente está entre el 20% y el 70% y para la zona descendente está entre el 70% y 20%. La curva que tenga mayor cantidad de pendientes consecutivas será aquella con la cual se debe continuar trabajando. Traslación de ejes: se utiliza cuando las condiciones iniciales son diferentes de cero. Permite llevar a condiciones iniciales iguales a cero un proceso X. Lo que se busca es trasladar los datos (ejes) al origen (0.0) en la identificación de sistemas lo que se busca en que los datos inicien con condiciones iniciales iguales a cero. 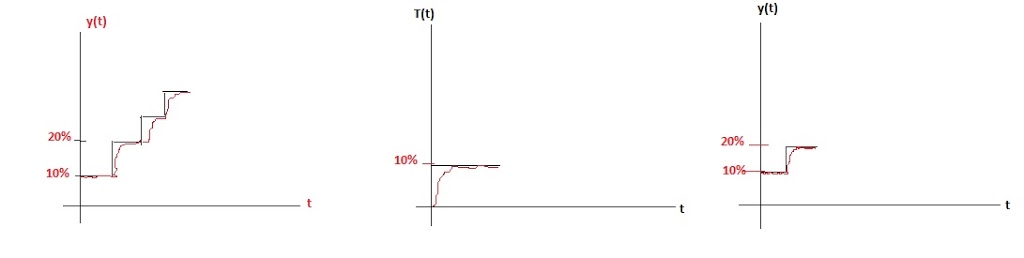 Ejemplo. 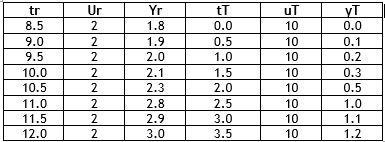 |
Para esta tabla de datos, se calculará el tiempo de muestreo.
Nota: si el escalón para la extracción del mejor modelo de la planta va del 10 al 20% entonces ur=20% hasta su último valor al 20%. Si es del 20 al 30% entonces Ur=30%. Lo dicho anteriormente corresponde para datos en forma ascendente, pero ahora: si el escalón desciende del 30 al 20%, Ur= 20%
Para la siguiente tabla de datos, tenemos en total 8 datos.
Lo anterior indica que cada 0.5 segundos hay toma de datos. El retardo de la planta varía entre 0 y 0.5 segundos.
PROCEDIMIENTO PARA LA IDENTIFICACIÓN DE SISTEMAS.
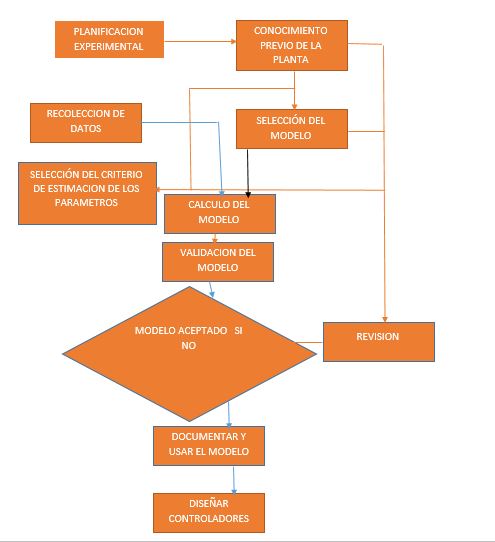
CONOCIMIENTO PREVIO: corresponde a aquel que se tenga de experiencias anteriores o de forma teórica. (modelación, fichas técnicas, catálogos) que pueden dar información, por ejemplo, del orden del sistema, el periodo de muestreo óptimo para la toma de datos, que tipo de perturbaciones pueden afectar a la planta, curva de linealidad etc.
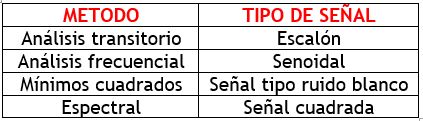
PLANIFICACION EXPERIMENTAL: hay que determinar el tipo de señal de entrada dependiendo de la planta y el método de identificación a utilizar, la cual puede ser: tipo escalón, onda senoidal, onda cuadrada, ruido blanco, PRBS (secuencia binaria pseudoaleatoria). En la siguiente tabla se describe el tipo de señal a usar para un método específico.
RECOLECCION DE DATOS: hay que tener en cuenta el periodo de muestreo, así como también la resolución del conversor analógico digital ADC y de la tarjeta de adquisición de datos.
si los datos presentan ruido eléctrico o mecánico en los instrumentos o en la línea de alimentación, se deben implementar circuitos tipo filtro analógicos o por software. Se recomienda que los instrumentos estén previamente calibrados para conocer su trazabilidad. Para saber cuántos datos hay que tomar, debe hacerse de tal forma que la respuesta tenga siempre su estado de cambio transitorio a estable. El periodo de muestreo es un factor importante, el cual en la práctica se recomienda a tener en cuenta la siguiente tabla:

NOTA: avasallamiento son sistemas relacionados con turbinas, motores, reactores.
NOTA: se debe tener un balance entre el periodo de muestreo y el sistema de memoria.
Ts << ocasiona saturación de datos
Ts>> ocasiona pérdida de datos
Ts estará en función de la respuesta de la variable o proceso.
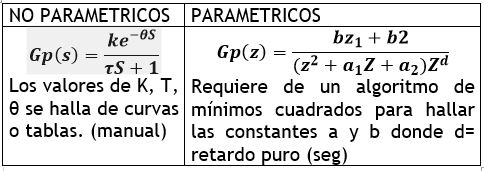
4-OBTENCIÓN DEL MODELO: se propone el modelo de forma continua o discreta de orden 1,2,3 tanto para continuo como para discreto. Si el sistema posee varias entradas o salidas, se propone el sistema en ecuaciones de espacio de estados.
5.CALCULO DEL MODELO: éste depende de la técnica o método utilizado, por ejemplo: gráfico o curva de reacción para sistemas continuos de orden 1 y 2. Para los modelos discretos se utilizan, por ejemplo: el método de mínimos cuadrados (L.S) least square.
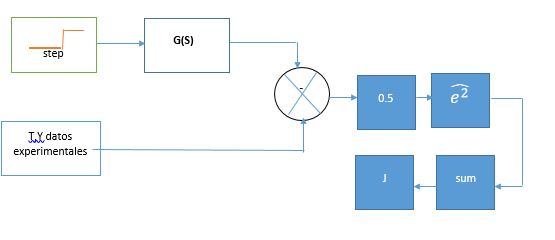
6. VALIDACIÓN DEL MODELO: (COMPARAR). Se busca el porcentaje de ajuste del modelo estimado a los datos experimentales (dinámica del sistema).
7. DOCUMENTAR Y USAR EL MODELO: se realiza un escrito sobre toda la experiencia a través de artículos, revistas, etc.
8. DISEÑO DEL CONTROLADOR
CONTENIDOS MÁS RELEVANTES.











