Contador de 00 a 99 con PIC18F4550 y Displays de 7 Segmentos

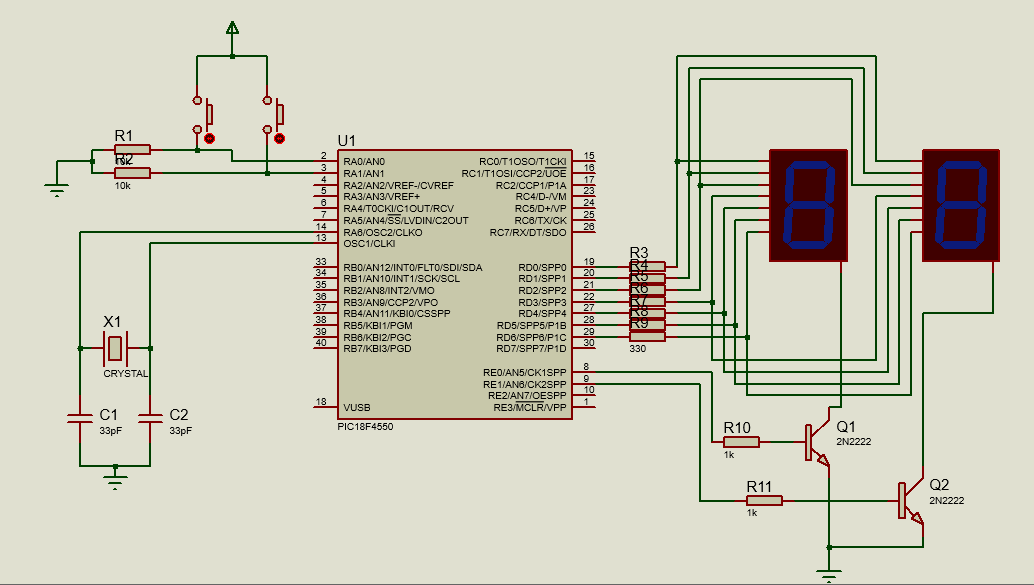
En este proyecto se implementa un contador digital de 00 a 99 utilizando el microcontrolador PIC18F4550, dos displays de 7 segmentos y dos pulsadores. El sistema permite incrementar y decrementar el valor mostrado mediante los pines RA0 y RA1, respectivamente. Además, se emplea multiplexación para controlar ambos displays con un número reducido de pines. Este … Leer más