
Introducción
En cualquier sistema de instrumentación, la calidad de la medición define la calidad de las decisiones. Sin embargo, uno de los problemas más comunes —y menos comprendidos— en la industria es el error en la medición de sensores.
Muchos ingenieros y técnicos asumen que un sensor funciona correctamente solo porque entrega una señal estable. Pero la realidad es más compleja: una medición puede ser estable y aun así ser incorrecta.
Este post está diseñado para ayudarte a identificar, analizar y corregir errores en sensores industriales, mejorando la confiabilidad de tus sistemas. Si trabajas con temperatura, presión, nivel o variables eléctricas, este contenido te va a servir directamente en campo.
El problema real: mediciones que “parecen correctas”
Uno de los errores más peligrosos en instrumentación es confiar en valores que no han sido validados.
Ejemplo típico:
- Un sensor de temperatura muestra 50 °C constantes
- El sistema no genera alarmas
- El proceso aparentemente funciona bien
Pero en realidad:
- La temperatura real puede ser 60 °C
- El sensor tiene un offset no detectado
- Se están tomando decisiones con datos incorrectos
Esto puede generar:
- Pérdidas económicas
- Fallos en calidad
- Riesgos operativos
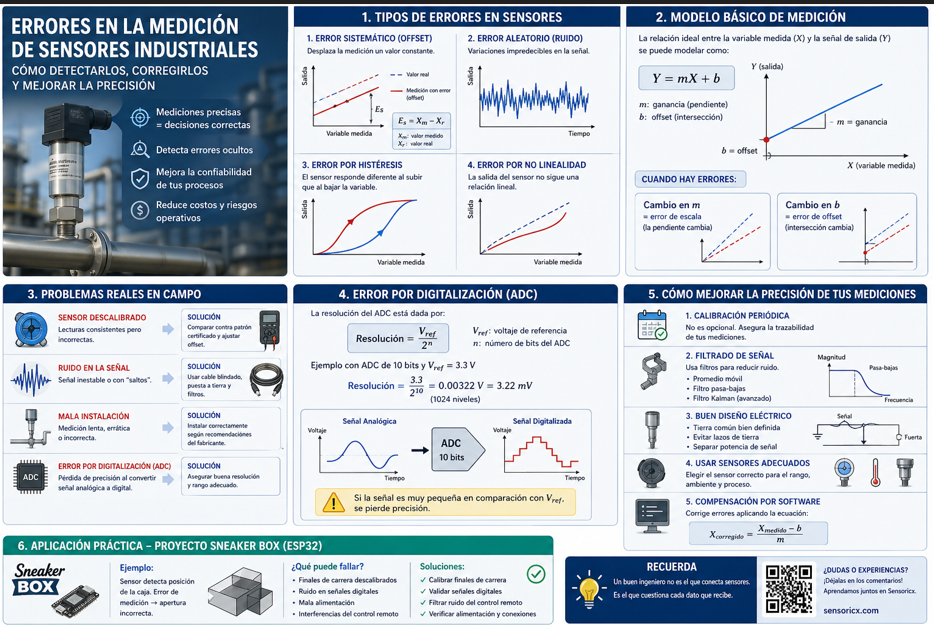
Tipos de errores en sensores
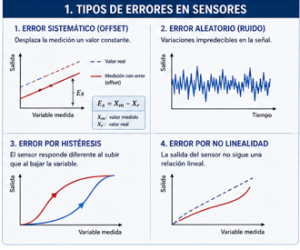
1. Error sistemático
Es un error constante que desplaza la medición.
Ejemplo:
- Sensor siempre mide +2 °C por encima del valor real
Se representa como:
Donde:
2. Error aleatorio
Variaciones impredecibles en la señal.
Causas comunes:
- Ruido eléctrico
- Interferencias EMI
- Mala conexión
3. Error por histéresis
El sensor no responde igual al subir que al bajar la variable.
Muy común en:
- Sensores de presión
- Sistemas mecánicos
4. Error por no linealidad
Cuando la salida del sensor no sigue una relación lineal con la variable medida.
Modelo básico de medición
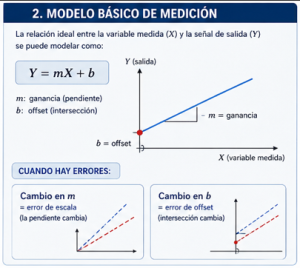
En instrumentación, muchas veces usamos un modelo lineal:
Problemas reales en campo (y cómo detectarlos)

Caso 1: Sensor desajustado
Síntoma:
- Lecturas consistentes pero incorrectas
Solución:
- Comparar contra un patrón certificado
- Aplicar ajuste de offset
Caso 2: Ruido en la señal
Síntoma:
- Señal inestable o “saltos”
Causas:
- Cables sin apantallar
- Mala puesta a tierra
Soluciones:
- Usar cable blindado
- Implementar filtros (hardware o software)
Caso 3: Mala instalación
Síntoma:
- Medición lenta o errática
Ejemplo:
- Sensor de temperatura mal ubicado (no en contacto real con el proceso)
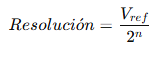
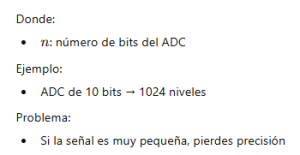
Caso 4: Error por digitalización (ADC)
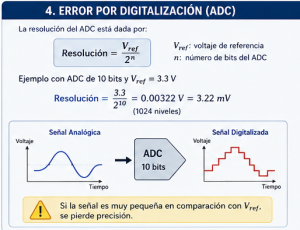
Cuando usas microcontroladores como ESP32 o Arduino:
Cómo mejorar la precisión de tus mediciones

1. Calibración periódica
No es opcional.
Frecuencia recomendada:
- Industria crítica: cada 3–6 meses
- Uso general: cada 6–12 meses
2. Filtrado de señal
Opciones:
- Promedio móvil
- Filtro pasa-bajas
- Filtro Kalman (más avanzado)
3. Buen diseño eléctrico
Claves:
- Tierra común bien definida
- Evitar lazos de tierra
- Separar potencia de señal
4. Uso de sensores adecuados
No todos los sensores sirven para todo.
Errores comunes:
- Usar sensores de bajo costo en procesos críticos
- No considerar el rango real de operación
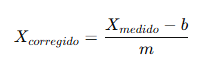
5. Compensación por software
Puedes corregir errores con:
Aplicación práctica (muy importante)
Si estás trabajando con un proyecto en especifico, este tema es crítico, en mi caso que yo estoy trabajando con el diseño de una caja automática el inconveniente es el siguiente:
Ejemplo:
- Sensor detecta posición de la caja
- Error de medición → apertura incorrecta
- Mala experiencia del usuario
Solución:
- Calibrar finales de carrera
- Validar señales digitales
- Filtrar ruido del control remoto
Bibliografía recomendada
Estas referencias respaldan los conceptos del post:
- Doebelin, E. O. – Measurement Systems: Application and Design
- Bentley, J. P. – Principles of Measurement Systems
- Johnson, C. D. – Process Control Instrumentation Technology
- Horowitz, P. & Hill, W. – The Art of Electronics
- Fraden, J. – Handbook of Modern Sensors