Generalmente todos los instrumentos electrónicos que conocemos de forma general hacen uso de un componente electrónico que hasta los días de hoy ha sido trascendental en el mundo de la electrónica y nos referimos específicamente al AMPLIFICADOR OPERACIONAL. Es muy común un amplificador generador de corriente continua con alta ganancia en tensión en lazo abierto cuyo valor supera los 50000(adimensional) que a través de la conexión de componentes adecuados y re-alimentados positivamente o negativamente constituyen el alma de estos controladores, solo requieren una corriente de entrada cuyo valor aproximado es de 0.5 mili amperes (mA) para dar lugar una variación total en la señal de salida.
Ya conocemos el símbolo de un amplificador operacional y este dispositivo posee una serie de terminales que son: la entrada inversora (-) entrada no inversora (+) entrada de saturación positiva (+V) entrada de saturación negativa (-V) salida Vo

figura 1 op amp
Este tipo de control funciona así: cuando la señal de la terminal no inversora aumenta unos pocos milivolts con relación al voltaje que recibe la terminal inversora, la salida del amplificador aumenta y es realimentada a condiciones gracias a dicho divisor de tensión que forman estas dos resistencia. Para establecer las condiciones iniciales la señal de entrada debe bajar suficientes milivolts en relacion al terminal inversor para lograr una compensación el efecto del divisor de voltaje formado por R1 y R2 el valor de la zona muerta dependerá de la relación de estas dos resistencias y será tanto más pequeño cuanto mayor sea esta relación de resistencias.

figura 2 control todo-nada
CONTROL PROPORCIONAL DE TIEMPO VARIABLE
Se deriva del control todo o nada con la diferencia de que posee un circuito RC entre la salida de la entrada inversora para de esta forma obtener un retardo de realimentación inversora y hacer que de esta forma el circuito oscile. Funciona así: si el voltaje de la entrada inversora es cero y el voltaje en la entrada no inversora es negativo, la señal de salida obviamente será negativa por lo cual el condensador se cargará de forma negativa y el divisor de tensión en el punto donde se encuentra conectado dicho condensador impedirá que su terminal tenga un voltaje muy bajo negativo que el voltaje de la entrada no inversora.
Ahora bien: si la entrada no inversora es positiva con relación a la entrada inversora, se hará positiva cargando el condensador positivamente en un ciempo que dependerá de R2 y C1. Cuando sucede dicho momento en que C1 compensa el divisor de tensión, la entrada inversora se hace positiva y provoca un cambio de signo de la señal de salida y esta pasará negativa. Luego la carga del condensador se empieza a hacer negatica y aumenta hasta que sobrepasa la región de influencia del divisor de voltaje con lo cual la entrada inversora será negativa y por ende la señal de salida cambiará a positiva y así sucesivamente. El periodo de oscilación dependerá obviamente de que tan grande o pequeño sea dicho condensador.
 |
| figura 3. control proporcional de tiempo variable. |
CONTROL PROPORCIONAL
El amplificador es usado como amplificador de ganancia finita. Da lugar a que la entrada deba ser muy debil, casi nula del orden de los 0.1 milivolts. Para disminuir la ganancia elevada es necesario efectuar una realimentación de la señal de salida con respecto a la entrada inversora mediante una resistencia de feedback y como nos importará que la señal de entrada tenga un valor diferente de cero, se le añade al circuito otra resistencia que es considerada resistencia de entrada. A continuación compartimos las configuraciones más tipicas. Por cierto son las que ya conocemos como: inversor, no inversor, restador.
 |
| figura 4 circuitos equivalentes a un controlador proporcional |
CONTROL PROPORCIONAL + INTEGRAL
La acción integral puede generarse en el amplificador operacional mediante un condensador conectado en serie con la realimentación negativa y con una resistencia conectada en serie con la terminal inversora.

El circuito A de la figura 5 tiene el inconveniente de invertir la señal de salida con relación a la señal de error, lo cual es indeseable en algunas aplicaciones. Para evitar este problema debe conectarse la señal de error a la entrada no inversora dejando el condensador de integral entre la salida y la entrada inversora y conectando esta ultima a la linea de cero voltios a traves de una resistencia de la figura 5B
Cuando se aplica una señal de error positiva a la entrada no inversora B, la salida cambia en una direccion positiva con lo cual el condensador C se va cargando pasando así una corriente a través de una resistencia que va a a tierra lo que provoca una variación de carga del condensador. El tipo de comportamiento es en forma de rampa.
 |
| controlador integral
CONTROLADOR PROPORCIONAL+INTEGRAL+DERIVATIVO
 Es básicamente la union de el controlador proporcional, integral y el derivativo. La acción proporcional aporta estabilidad a la planta, la acción integral aporta corrección de errores y la acción derivativa aporta velocidad a la respuesta de salida. En este controlador en particular el potenciometro de acción proporcional se encuentra en la salida del segundo amplificador operacional. Los controladores electronicos suelen disponer de un conmutador automático-manual con un reostato para control manual y un circuito de memoria para que el cambio automático a manual se efectue sin saltos en la posición de una válvula de control.
Los instrumentos electronicos de control de panel descritos son de tipo miniatura, generalmente se incorporan en microcontroladores lo que les ha permitido una incorporacion de inteligencia al controlador para permitir por ejemplo el ajuste del set point y aciones PID sin extraer el instrumento de su base en el panel, el autoajuste del instrumento puede acomodarse a las variaciones de regimen de carga del proceso y autodiagnóstico del aparato.
 VIDEO CONTROLADORES PID ENGLISH
|
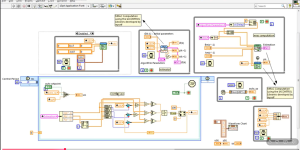
APLICACION DE UN CONTROL PID Y LABVIEW
CONFIGURACION DE UN CONTROLADOR DE TEMPERATURA