
Qué es un Microcontrolador?

Un microcontrolador es un dispositivo integrado que combina en un solo chip un procesador, memoria y periféricos necesarios para controlar dispositivos electrónicos. Es como una pequeña computadora que incluye sistemas para controlar elementos de entrada/salida. Básicamente, es un pequeño ordenador diseñado para realizar tareas específicas de control y automatización en una variedad de aplicaciones. Aquí hay una descripción más detallada de sus componentes y funciones:
Componentes Principales de un Microcontrolador
-
Unidad Central de Procesamiento (CPU):
- Es el «cerebro» del microcontrolador, encargado de ejecutar las instrucciones del programa almacenado en la memoria.
- Memoria:
- Memoria de Programa (Flash/ROM): Almacena el código del programa que el microcontrolador ejecuta.
- Memoria de Datos (RAM): Utilizada para almacenar datos temporales y variables durante la ejecución del programa.
- EEPROM: Una memoria no volátil que puede ser utilizada para almacenar datos que deben persistir entre reinicios.
- Periféricos:
- Entradas/Salidas Digitales (GPIO): Pueden ser configuradas como entradas o salidas para interactuar con otros componentes electrónicos.
- Convertidores A/D y D/A (ADC/DAC): Convierte señales analógicas en digitales y viceversa.
- Temporizadores/Contadores: Para medir intervalos de tiempo o contar eventos.
- Interfaces de Comunicación: Como UART, SPI, I2C, CAN, USB, entre otros.
-
Temporizadores y Contadores
- Utilizados para medir intervalos de tiempo, generar eventos temporizados, y contar eventos externos.
Componentes Clave:
- Temporizadores: Realizan tareas basadas en el tiempo.
- Watchdog Timer: Monitorea el funcionamiento del microcontrolador y lo reinicia en caso de fallos.
- PWM (Pulse Width Modulation): Genera señales de modulación de ancho de pulso para controlar dispositivos como motores.
5. Oscilador de Reloj
- Proporciona la señal de reloj que sincroniza todas las operaciones del microcontrolador.
Componentes Clave:
- Oscilador Interno: Genera la señal de reloj internamente.
- Cristal Externo: Puede ser usado para mayor precisión en la señal de reloj.
6. Interfaz de Depuración y Programación
- Permite la programación y depuración del microcontrolador.
Componentes Clave:
- Interfaces de Programación: Como JTAG, SWD (Serial Wire Debug), ISP (In-System Programming).
- Depurador: Permite la inspección y control del funcionamiento del microcontrolador durante el desarrollo.
7. Fuentes de Alimentación
- Gestionan la alimentación eléctrica del microcontrolador.
Componentes Clave:
- Regulador de Voltaje: Estabiliza el voltaje suministrado al microcontrolador.
- Módulos de Gestión de Energía: Incluyen modos de bajo consumo para optimizar el uso de energía.
8. Control de Interrupciones
- Permite al microcontrolador responder rápidamente a eventos externos o internos.
Componentes Clave:
- Vector de Interrupciones: Tabla que apunta a las rutinas de servicio de interrupciones.
-
Controlador de Interrupciones: Gestiona las prioridades y el enmascaramiento de interrupciones.
Tipos de Registros en un Microcontrolador

- Registros de Propósito General (GPR):
- Descripción: Utilizados para almacenar datos temporales durante la ejecución de programas.
- Función: Ayudan en operaciones aritméticas y lógicas, manipulación de datos y otras tareas de procesamiento.
- Ejemplo: En un microcontrolador AVR, como el ATmega328P, hay 32 registros de propósito general denominados R0 a R31.
- Registros de Propósito Especial (SPR):
- Descripción: Utilizados para funciones específicas y control del microcontrolador.
- Función: Incluyen registros como el contador de programa, el puntero de pila, registros de estado y registros de control de periféricos.
- Contador de Programa (PC):
- Descripción: Contiene la dirección de la siguiente instrucción a ejecutar.
- Función: Controla el flujo de ejecución del programa. Se incrementa automáticamente después de la ejecución de cada instrucción.
- Ejemplo: En el AVR ATmega328P, el PC puede direccionar hasta 32 KB de memoria de programa.
- Registro de Estado (Status Register o Flags Register):
- Descripción: Contiene indicadores que reflejan el resultado de operaciones aritméticas y lógicas.
- Función: Indica condiciones como el carry, zero, overflow, negativo, y otros estados.
- Ejemplo: En el AVR, este registro se llama SREG (Status Register) y tiene 8 bits que representan diferentes flags.
- Puntero de Pila (Stack Pointer, SP):
- Descripción: Apunta a la parte superior de la pila.
- Función: Utilizado para gestionar llamadas a funciones y interrupciones, almacenando direcciones de retorno y datos temporales.
- Ejemplo: En el ATmega328P, el SP es un registro de 16 bits que apunta a la SRAM.
- Registros de Puntero (Index Registers):
- Descripción: Utilizados para direccionamiento indirecto.
- Función: Ayudan a acceder a la memoria de datos de manera eficiente, facilitando operaciones como bucles y manipulación de arrays.
- Ejemplo: En el AVR, los registros X, Y y Z se usan como punteros de datos.
- Registros de Periféricos:
- Descripción: Controlan y configuran los periféricos del microcontrolador.
- Función: Incluyen registros para ADC, temporizadores, UART, SPI, I2C, GPIO, etc.
- Ejemplo: En el ATmega328P, los registros DDRx, PORTx, y PINx controlan las operaciones de los pines de entrada/salida.
Ejemplo de Uso de Registros en un Microcontrolador (AVR ATmega328P)
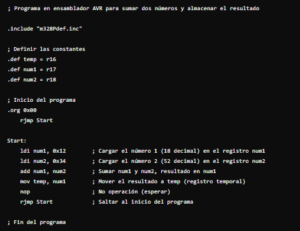
Vamos a considerar un ejemplo de código en ensamblador para ilustrar cómo se utilizan algunos de estos registros:
Descripción del Ejemplo
- Definición de Registros: Se definen los registros
temp,num1ynum2como alias para los registros R16, R17 y R18 respectivamente. - Cargar Datos en Registros: Utilizando la instrucción
ldi(load immediate), se cargan valores en los registrosnum1ynum2. - Operación Aritmética: La instrucción
addsuma los valores denum1ynum2, almacenando el resultado ennum1. - Mover Resultado: La instrucción
movmueve el resultado denum1al registrotemp. - Instrucción de Salto: La instrucción
rjmp Startcrea un bucle infinito para repetir el proceso.
Este ejemplo básico muestra cómo se utilizan los registros de propósito general para realizar operaciones simples en un microcontrolador. En aplicaciones más complejas, se utilizan registros de propósito especial y de periféricos para controlar y gestionar diversas funcionalidades del sistema.

Para el Microcontrolador, un Microprocesador es el conjunto de tres sistemas digitales: ALU, unidad de control y registros. Los microprocesadores fueron los padres de los microcontroladores. Uno de los primeros procesadores comerciales que se enseñaban en las universidades era el el Z80.
El procesador Z80 requiere de componentes adicional para poder funcionar en alguna aplicación. Por ejemplo, no tiene RAM o FLASH. Estás dos memorias sirven para guardar el contenido de los datos del programa y al programa en si mismo respectivamente.
Para ensamblar un circuito mínimo, se tenia que conectar al Z80: memoria externa y controladores para poder tener algún puerto paralelo. No se diga un puerto serial, se tenia que diseñar mediante electrónica reconfigurable (GALs, compuertas lógicas, Flip-Flops, Multiplexores, etc).
Diferencia entre un microcontrolador y un microprocesador
- Microcontrolador: Un sistema completo en un solo chip, ideal para tareas específicas de control en sistemas embebidos. Integra CPU, memoria y periféricos.
- Microprocesador: Solo la CPU, diseñada para tareas de procesamiento intensivo y multitarea. Requiere componentes externos como memoria y periféricos.
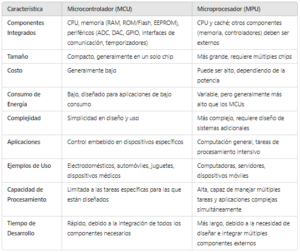
La elección entre un microcontrolador y un microprocesador depende de los requisitos específicos de la aplicación, incluyendo la complejidad del procesamiento necesario, el costo, el tamaño, el consumo de energía y el tiempo de desarrollo.